L’Ă©quipe PhysX de NVIDIA a rĂ©cemment proposĂ© Ă des utilisateurs avancĂ©s de PhysX, choisis pour leur expĂ©rience et le temps qu’ils peuvent apporter aux tests, d’essayer en avant-première PhysX 3.3. Au menu, si ce n’est ce qui a Ă©tĂ© prĂ©sentĂ© Ă la GDC de cette annĂ©e, on retrouve un bon nombre d’amĂ©liorations de performances. De manière gĂ©nĂ©rale, cependant, plus d’optimisations sont attendues pour la version finale.
Amélioration des performances et de la stabilité du solveur de solides
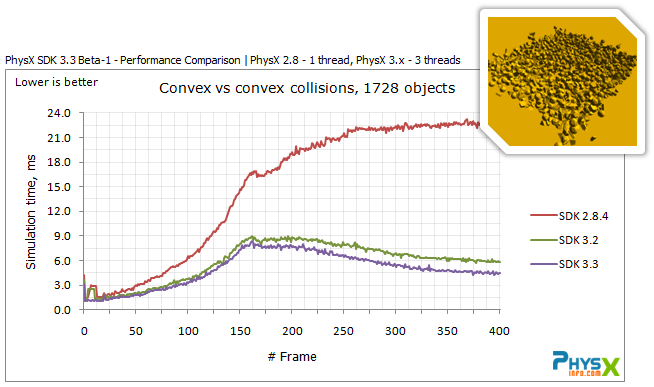
Les performances ont Ă©tĂ© amĂ©liorĂ©es de quinze Ă vingt pour cent par rapport Ă PhysX 3.2, qui reprĂ©sentait dĂ©jĂ une grande amĂ©lioration par rapport Ă PhysX 2.8.4. L’empreinte mĂ©moire a Ă©tĂ© Ă©galement amĂ©liorĂ©e.
Algorithme alternatif de phase large de détection des collisions
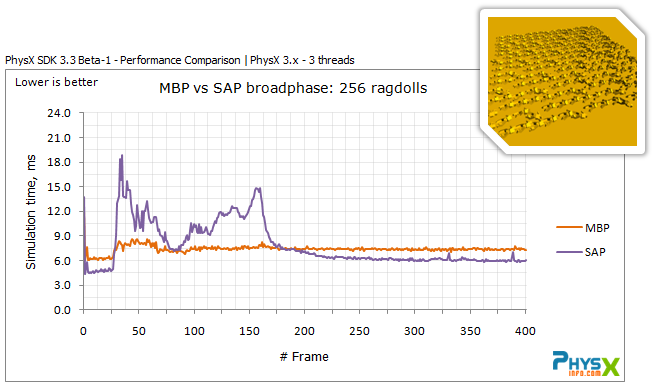
L’algorithme MBP (multibox pruning) est maintenant disponible comme alternative Ă SAP (sweep and prune). Il fournit de meilleures performances quand tous les objets de la scène sont en mouvement ou quand de grands nombres d’objets y sont ajoutĂ©s. Ces bĂ©nĂ©fices ne se montrent cependant que dans les cas oĂą un grand nombre d’objets sont simulĂ©s activement et en mouvement simultanĂ©ment ; sinon, l’algorithme SAP fournira de meilleures performances. Pour utiliser MBP, il faudra configurer un peu plus, en dĂ©finissant un grille du monde et des frontières.
Requêtes de scène plus robustes
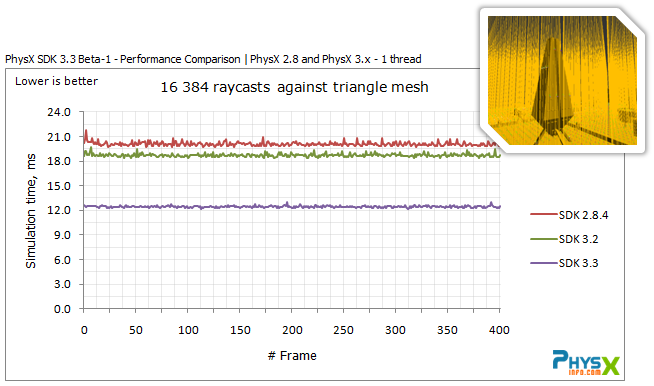
L’API des requĂŞtes de scène a Ă©tĂ© modifiĂ©e pour ĂŞtre plus cohĂ©rente, tandis que l’implĂ©mentation a Ă©tĂ© amĂ©liorĂ©e dans un grand nombre de scĂ©narios.
AmĂ©liorations d’autres algorithmes
Le système de détection des collisions entièrement basé sur les distances PCM (persistent contact manifold) est maintenant souvent plus rapide et plus robuste que les algorithmes précédents.
Pour la dĂ©tection des collisions continue (CCD), de grandes optimisations ont Ă©tĂ© apportĂ©es, faisant que le comportement du système a Ă©tĂ© amĂ©liorĂ©. L’algorithme supporte maintenant des modifications de contact et les notifications.
Il sera bientĂ´t possible de partager des formes entres des solides, ce qui permettra d’Ă©conomiser de la mĂ©moire si plusieurs acteurs ont une gĂ©omĂ©trie commune. Cependant, les gĂ©omĂ©tries ne pourront pas voir leurs attributs modifiĂ©s tant qu’elles sont attachĂ©es Ă plusieurs acteurs.
Comme annoncĂ© Ă la GDC, le solveur de tissus supporte maintenant de nouvelles fonctionnalitĂ©s, comme les autocollisions, les collisions entre tissus, un nouveau solveur GPU et bien d’autres.
Support matériel
Le code GPU a Ă©tĂ© portĂ© vers CUDA 5, d’oĂą un support des GPU Kepler. Également, tant le solveur de tissus que de particules supportent la fonctionnalitĂ© d’interopĂ©rabilitĂ© CUDA-Graphics, ce qui permet d’amĂ©liorer les performances de la simulation en Ă©liminant des appels inutiles au CPU.
Sur les plateformes ARM, PhysX peut dĂ©sormais utiliser les extensions NEON de SIMD, afin d’amĂ©liorer les performances.
Source : http://physxinfo.com/news/11241/physx-sdk-3-3-closed-beta-testing-begins/