J’ai rûˋcement traduit l’article Implûˋmenter un Voxel Cone Tracing, qui prûˋsente quelques difficultûˋs techniques pour ceux qui ne sont pas habituûˋs avec les concepts prûˋsentûˋs dans cet article. Ce billet de blog û pour objectif de prûˋsenter ces concepts.
Quelques dûˋfinitions
Illumination globale
Les techniques d’illuminations globales (GI) visent û amûˋliorer le rendu d’une scû´ne 3D, en prenant en compte aussi bien la lumiû´re directe (les sources de lumiû´res qui ûˋclairent les objets) que la lumiû´re indirecte (rûˋflexion de la lumiû´re sur les objets, qui ûˋclaire d’autres objets). Ces techniques permettent d’obtenir des rendus rûˋalistes, au prix d’un temps de calcul relativement long (parfois trop pour ûˆtre compatible avec du rendu en temps rûˋel). Un domaine de la recherche actuelle vise û dûˋvelopper de nouveaux algorithmes d’illumination globale compatible avec le temps rûˋel (jeux 3D).
(source : Wikipûˋdia – Illumination globale)
Illumination indirecte
Dans l’illumination directe (û gauche sur l’illustration suivante), la lumiû´re provenant d’une source est directement rûˋflûˋchie sur une surface, puis renvoyûˋ vers la camûˋra. C’est le modû´le classique de calcul de la lumiû´re en 3D, que l’on retrouve par exemple dans le modû´le de Phong. La lumiû´re est alors dûˋcomposûˋe en plusieurs composantes : la lumiû´re ambiante (qui reprûˋsente une illumination globale constante), la lumiû´re diffuse (qui reprûˋsente une diffusion de la lumiû´re sur la surface) et la lumiû´re spûˋculaire (qui reprûˋsente une rûˋflexion sur la surface).

(Source : Real-Time Global Illumination for Point Cloud Scenes)
Dans l’illumination indirecte, on considû´re que chaque surface qui reûÏoit de la lumiû´re va û son tour en renvoyer. Il n’y a donc plus qu’une seule source de lumiû´re, mais une infinitûˋ, correspondant û chaque surface qui renvoie de la lumiû´re. Pour rûˋaliser le rendu d’une scû´ne, il faut donc procûˋder de la faûÏon suivante :
- pour chaque surface S1 visible par la camûˋra ;
- pour chaque surface S2 visible depuis la surface S1 ;
- calculer la lumiû´re reûÏue par la surface S2 provenant de la source ;
- calculer la lumiû´re renvoyûˋe par la surface S2 vers la surface S1 ;
- calculer la lumiû´re reûÏue par la surface S1 provenant de la surface S2 ;
- calculer la lumiû´re totale renvoyûˋe par la surface S1 vers la camûˋra.
Chaque ûˋtape doit prendre en compte plusieurs paramû´tres. Pour (3), il faut par exemple prendre en compte la distance entre la source et la surface S2 et l’attûˋnuation de la lumiû´re en fonction de la distance. Pour (4), il faut prendre en compte les caractûˋristiques de la surface et sa capacitûˋ û rûˋflûˋchir la lumiû´re. Pour (5), il faut prendre en compte la distance entre les surfaces S1 et S2 et l’angle d’incidence. Pour (6), les capacitûˋs de rûˋflexion de la surface S1 et la distance entre la surface S1 et la camûˋra.
Cette premiû´re approche simple peut largement ûˆtre amûˋliorûˋe (et complexifiûˋe), en prenant en compte par exemple que la lumiû´re peut se rûˋflûˋchir plusieurs fois sur des surfaces avant d’atteindre la camûˋra (particuliû´rement important lorsque les surfaces sont trû´s rûˋflûˋchissantes, comme du verre ou du mûˋtal poli), de la diffusion de la lumiû´re dans le brouillard ou la poussiû´re (lumiû´re volumûˋtrique, ûˋclat lumineux), la prûˋsence de plusieurs sources lumineuses (voir des milliers de sources lumineuses dans le cas de particules incandescentes).
Lancûˋ de rayons
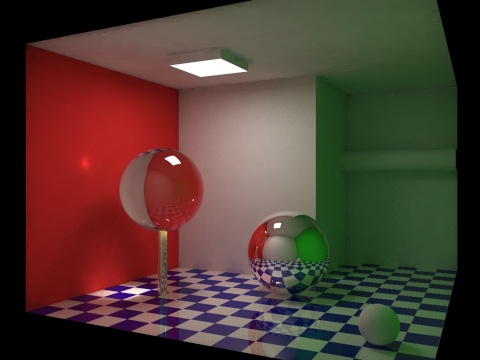
Il existe plusieurs techniques de « lancûˋs ». Elles reposent sur l’idûˋe que la lumiû´re est constituûˋe de rayons qui vont partir de des sources lumineuses, se rûˋflûˋchir, diffuser et rûˋfracter sur les diffûˋrentes surfaces (chaque surface pouvant renvoyer plusieurs rayons), puis atteindre la camûˋra. Dans les techniques de photon mapping, on part des sources lumineuses, on ûˋmet des rayons et on les suit jusqu’û la camûˋra (cette technique est dûˋcrite dans un autre article du blog de Simon et fera l’objet d’une traduction). Dans les techniques de lancûˋ de rayons, on part de la camûˋra, on lance un rayon pour chaque pixel de l’image finale et l’on remonte jusqu’aux sources de lumiû´re (illustration suivante).

(Source : Wikipûˋdia – Raytracing)
Dans la technique du lancûˋ de cûÇnes (Cone Tracing), prûˋsentûˋe dans l’article traduit, on remplace simplement les rayons par des cûÇnes pour le calcul de l’illumination.
Occlusion ambiante
Cette technique fera ûˋgalement l’objet de plusieurs traductions du blog de Simon, je la dûˋtaillerai û ce moment lû .
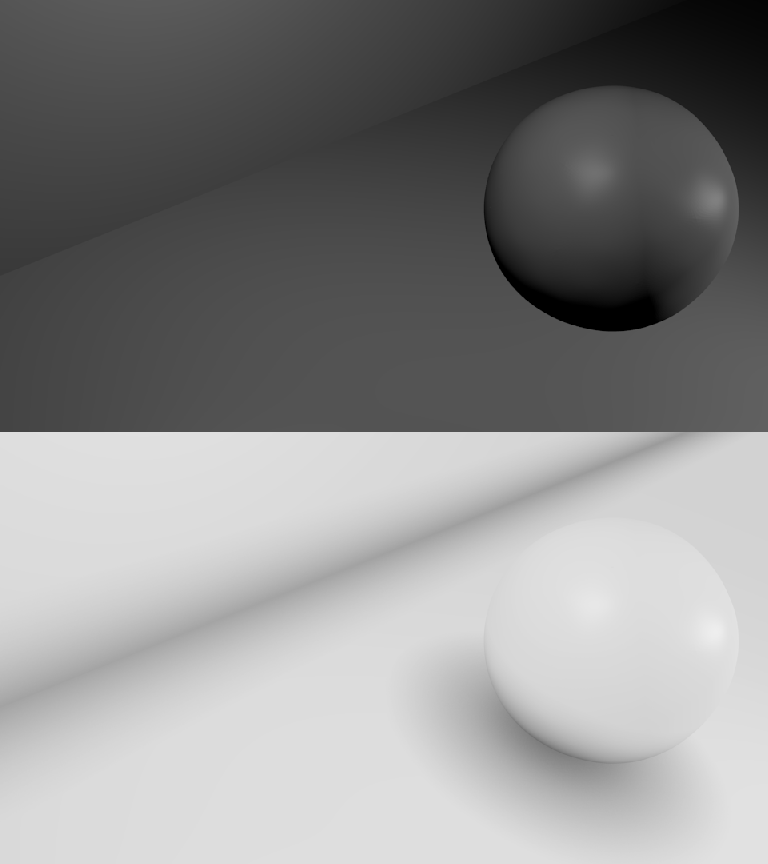
Simplement pour comprendre l’idûˋe gûˋnûˋrale : lorsque deux surfaces sont proches (dans une fissure, un trou), la lumiû´re indirecte diminue fortement et l’on observe des ombres douces. Plus les surfaces sont proches et fermûˋes, plus l’ombrage sera important. L’illustration suivante reprûˋsente la mûˆme scû´ne sans (en haut) et avec l’occlusion ambiante (en bas). Remarquez en particulier l’ombre dans l’angle du mur et du sol et entre la sphû´re dans l’image du bas.
Cette technique amûˋliore fortement la qualitûˋ du rendu et commence û ûˆtre trû´s utilisûˋe dans les jeux. Un de ses points forts est que pour un objet statique (ou peu dynamique), l’occlusion ambiante ne varie pas (ou peu) et il est possible de la prûˋ-calculer, le rûˋsultat ûˋtant mis dans une texture. Il suffit ensuite d’appliquer la texture sur l’objet lors du rendu, comme n’importe quelle autre texture.
Il existe plusieurs algorithmes de calcul de l’occlusion ambiante, mais pour comprendre le principe, voyons un exemple simple reprûˋsentûˋ dans l’illustration suivante. Pour chaque point d’une surface, on va lancer un nombre fixûˋ de rayons qui vont parcourir une distance fixûˋe aussi dans toutes les directions. On compte ensuite le nombre de rayons qui ne rencontrent pas une autre surface et on calcul le rapport entre le nombre de rayons ayant rencontrûˋs une surface et le nombre de rayons lancûˋs. Ainsi, dans l’illustration suivante, pour le point A, sur les six rayons lancûˋs, aucun ne rencontre de surfaces, le rapport est de 0/6 = 0 %. Pour le point B, seul quatre rayons ne rencontrent pas de surfaces sur les six lancûˋs, le rapport est de 4/6 = 66 %. Pour le point C, deux rayons ne rencontrent pas de surfaces, le rapport est de 2/6 = 33 %.
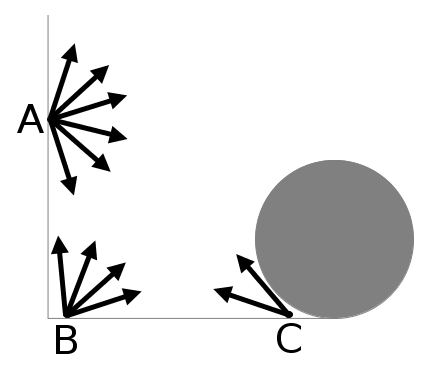
Il suffit ensuite d’attûˋnuer la lumiû´re pour chaque point en fonction du rapport calculûˋ. Plus le rapport est proche de 0 %, plus la surface sera sombre et plus le rapport est proche de 100 %, plus la surface est claire.
Pour obtenir un bon rendu, on pourra augmenter le nombre de point et le nombre de rayons lancûˋs, mais l’impact sur les performances sera important.
Partitionnement de l’espace
Voxel
Le principe des voxels est relativement simple : ils sont l’ûˋquivalent en 3D des pixels pour la 2D. Un exemple bien connu d’utilisation des voxels est le jeu Minecraft, dans lequel chaque ûˋlûˋment (terrain, objets) sont reprûˋsentûˋs par des cubes.

(Source : Wikiûˋpdia – Minecraft)
Les voxels sont particuliû´rement gourmand en termes de performances et sont encore peu utilisûˋs pour les jeux vidûˋos. Ils sont particuliû´rement adaptûˋs pour le rendu de volumes transparents (verre, liquide, fumûˋe, nuage) ou de gûˋomûˋtries trû´s complexes (pour le rendu d’un mesh complexe, une approche utilisant une version low poly du mesh et une texture des Displacement/Normal/Bump mapping).
Octree
Un octree est une structure permettant de partitionner l’espace dans un arbre, permettant par exemple de faciliter la recherche d’un ûˋlûˋment par rapport û sa position 3D. La construction d’un tel arbre est simple : û chaque itûˋration, le cube reprûˋsentant une partie de l’espace est divisûˋ en 8 cubes.

(Source : GPU Gems 2 – Octree Textures on the GPU)
L’intûˋrûˆt des octrees avec les voxels est que l’on va pouvoir utiliser une structure « creuse » : les zones qui sont vides ne seront pas divisûˋes en cubes plus petits, simplifiant ainsi les algorithmes de recherche et la mûˋmoire.