Annoncée il y a de cela un an, la nouvelle mouture des processeurs Intel Xeon Phi, nom de code Knights Landing, était annoncée : ces processeurs sont maintenant livrés aux fournisseurs de matériel HPC. Avec ces nouvelles puces, Intel vise le même segment que NVIDIA avec ses cartes graphiques (GPU) de génération Pascal : l’apprentissage profond, le calcul scientifique de haute performance (HPC).
Actuellement, quatre modèles sont disponibles, avec un nombre de cÅ“urs variable (de soixante-quatre à septante-deux) et des fréquences aussi variables (entre 1,3 et 1,5 GHz), des caractéristiques proches des GPU actuels comme NVIDIA Pascal. Tous sont livrés avec seize gigaoctets de mémoire vive (MCDRAM), empilée et très proche du processeur, pour une bande passante de presque cinq cents gigaoctets par seconde. Ces différentes puces représentent des compromis différents : la plus puissante (7290, 3,46 Tflops) est la plus chère (6294 $), avec un produit bien plus abordable au niveau du téraflops par euro (7210 à 2438 $ pour 2,66 Tflops) ; l’une optimise le ratio performance par watt (7250, 3,05 Tflops pour 215 W, là où le 7290 fournit 3,46 Tflops pour 245 W) et la dernière la mémoire disponible par cÅ“ur (7230, soixante-quatre cÅ“urs, comme le 7210, mais la mémoire a une fréquence plus élevée).
Au niveau des chiffres bruts, ces processeurs ne dépassent pas l’offre de NVIDIA : « à peine » trois téraflops et demi pour le plus haut de gamme, quand les GPU NVIDIA Pascal atteignent cinq téraflops (et une bande passante de cinquante pour cent plus élevée, à sept cent vingt gigaoctets par seconde). Par contre, selon les applications, à cause de la différence d’architecture fondamentale, les résultats varient énormément (les Xeon Phi sont organisés comme des processeurs traditionnels : chaque cÅ“ur peut exécuter une instruction propre, contrairement aux GPU, où la même instruction est exécutée sur un grand nombre de cÅ“urs). Ainsi, pour de la simulation de dynamique moléculaire, pour le test de performance LAMPPS, un Xeon Phi de milieu de gamme (7250) a fonctionné cinq fois plus vite en consommant huit fois moins de mémoire qu’un GPU NVIDIA K80 (la génération précédant les Pascal). Pour de la visualisation par lancer de rayon, Intel indique être cinq fois plus rapide ; le facteur descend à trois pour de la simulation de risque financier. Ces comparaisons ne sont pas entièrement équitables, à cause de la différence d’âge entre les processeurs, mais donnent la tendance qu’Intel veut montrer. Ces résultats devront être confirmés par des indépendants pour être fiables.
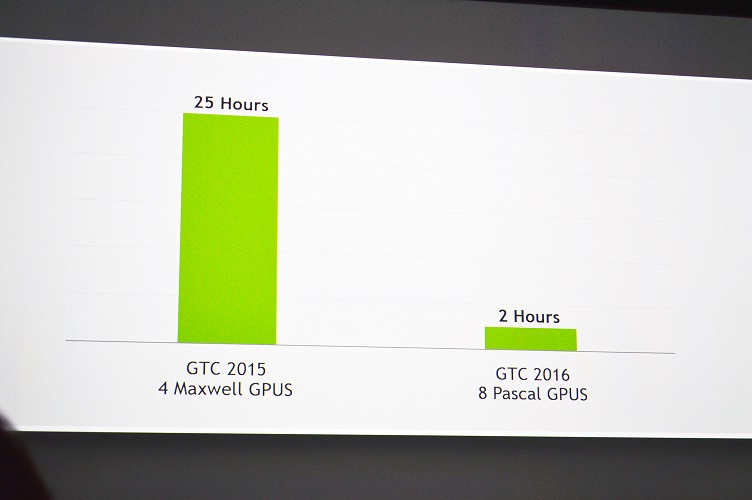
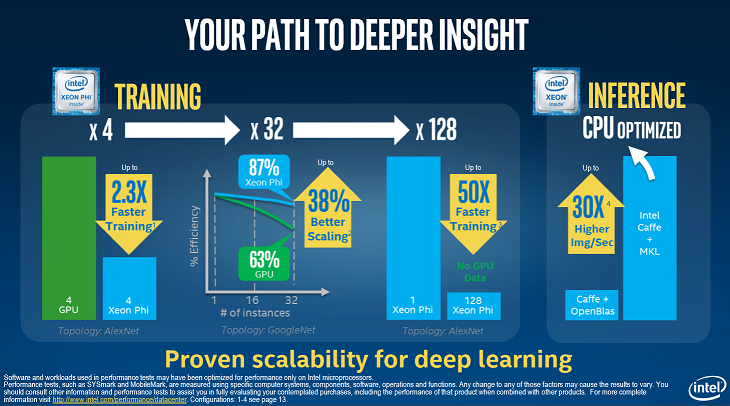
Parmi les tests de performance, Intel s’est aussi orienté vers l’apprentissage profond, branche dans laquelle NVIDIA s’impose actuellement. Ce domaine est actuellement à la pointe de la recherche, avec des résultats de plus en plus intéressants : c’est grâce à des techniques de ce genre que Google a pu battre le joueur le plus fort au monde au jeu de go. Sur un même jeu de test, un Xeon Phi 7250 a obtenu sa réponse en cinquante fois moins de temps qu’un seul processeur traditionnel ; avec quatre tels Xeon Phi, les temps de calcul ont été réduits d’un facteur deux par rapport à quatre GPU NVIDIA K80.
Intel précise également qu’il est plus facile de programmer ses processeurs Xeon Phi : ils embarquent beaucoup plus de cÅ“urs, mais c’est la seule différence avec les processeurs habituels de nos PC, alors qu’il faut réécrire complètement son code (ou utiliser des API adaptées) pour les GPU, avec une phase d’optimisation du code qui nécessite des compétences plus spécifiques. La nouvelle génération de Xeon Phi apporte cependant une distinction plus importante : ces processeurs Intel pourront être utilisés comme processeurs principaux (pas seulement comme cartes d’extension), ce qui évite les opérations de transfert de données, très limitantes pour la performance des applications actuelles. Il reste cependant à déterminer si ces processeurs seront suffisamment rapides pour effectuer toutes les opérations des applications qui leur sont soumises (ils fonctionnent à une fréquence réduite par rapport aux processeurs habituels : ils excellent dans le traitement parallèle, mais pas en série, qui constitue parfois une part importante du code à exécuter).
Ni ces nouveaux Xeon Phi ni les GPU NVIDIA Pascal ne sont actuellement utilisés à grande échelle pour du calcul scientifique. Cependant, ces premiers résultats montrent que les deux jouent dans la même cour. Si les mesures d’Intel se généralisent, ils deviendront un concurrent plus que très sérieux de NVIDIA, notamment dans le marché en expansion de l’apprentissage profond ; s’ils ont en plus l’avantage du prix, la dominance de NVIDIA sera vite mise à mal.
Sources : Intel Takes on NVIDIA with Knights Landing Launch, Intel’s Knights Landing: Fresh x86 Xeon Phi lineup for HPC and AI, Intel Xeon Phi Knights Landing Now Shipping; Omni Path Update, Too.
Merci à Claude Leloup pour sa relecture orthographique.